This week we have been working in the autonomous part of the tetrahedron challenge. We completed the part of the challenge that you had to use the remote for and we are working on the autonomous now. Next we are doing the ball challenge.
The competition that we reconfigured our robot for is picking op a racket ball and dropping it into a piece of pvc pipe that is about one and a half feet tall. We built the robot with the new end used to pick up the ball in solid works.
This week we finished our objective to put two tetrahedrons on a PVC pipe in 60 seconds. We put two tetrahedrons on the top and we got a hundred for the challenge.
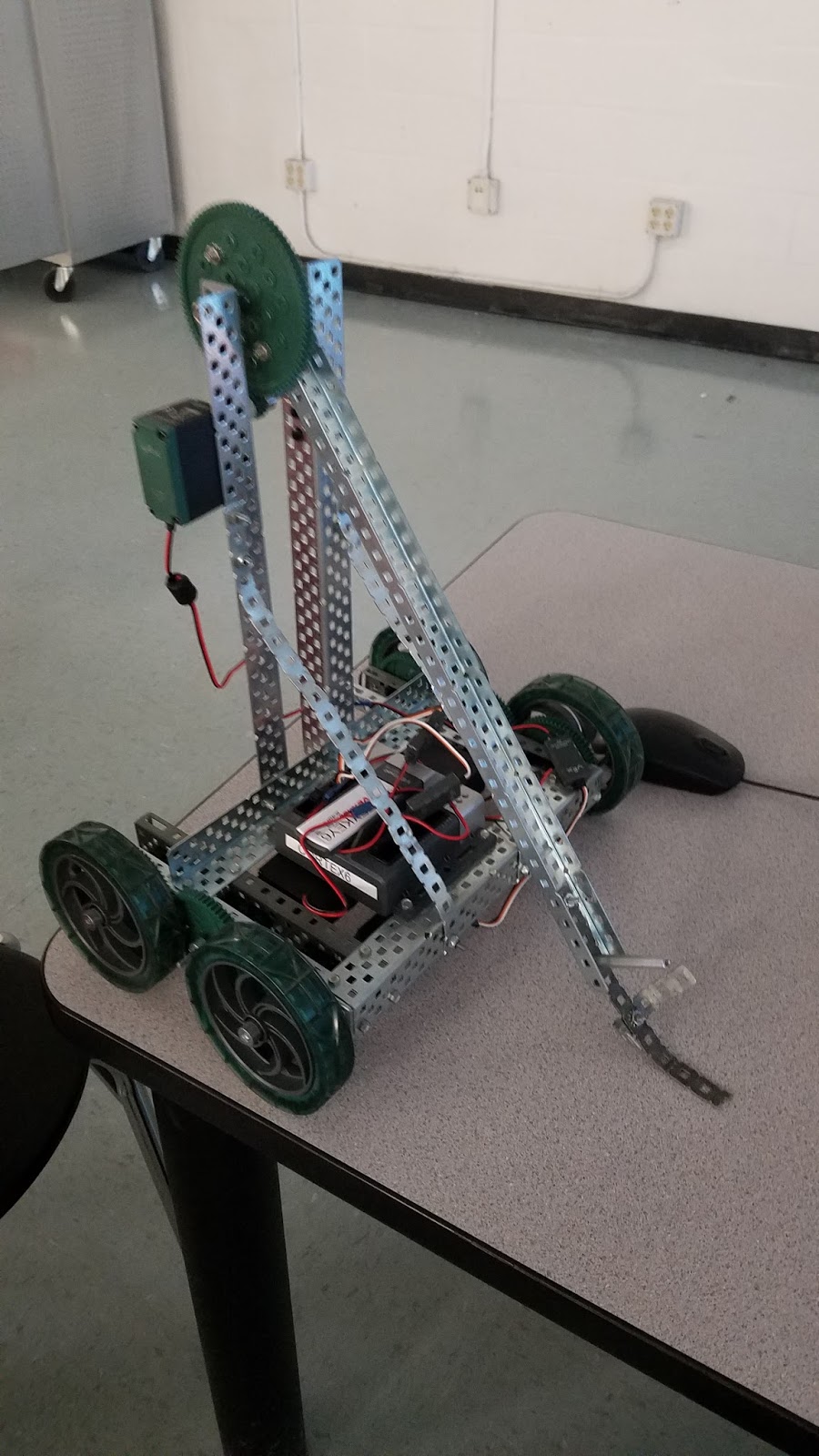
This week what we got accomplished was the addition of the arm to our robot. The challenge that we are working on now is putting a tetrahedron on top of the PVC stand.










 This week we finished our objective to put two tetrahedrons on a PVC pipe in 60 seconds. We put two tetrahedrons on the top and we got a hundred for the challenge.
This week we finished our objective to put two tetrahedrons on a PVC pipe in 60 seconds. We put two tetrahedrons on the top and we got a hundred for the challenge.







{kind=link}